Levi Tynan
PhD, Engineering
Levi Tynan is an electrical technical officer at Western Sydney University in Kingswood, where he manages the technical side of all electrical engineering tasks on campus. Levi's academic expertise is in soft robotics and biomimicry technology. His work focuses on a new type of soft robotics called HASEL actuators. His groundbreaking work in the field includes modelling the forces produced in HASEL actuators and suggesting how to improve their design, which has been published in the renowned MDPI Actuators journal. He holds a Bachelor of Engineering (Hons) from Western Sydney University, where he sub majored in biomedical engineering. Currently completing his Doctor of Philosophy at Western Sydney University, Levi drives innovation in Soft robotics, aiming to create a new kind of HASEL actuator to revolutionise the field. His commitment to excellence and passion for discovery mark Levi as a prominent figure in the academic landscape.
Soft Robotics and Biomimicry - Improving HASEL actuators
[Introduction]
Levi Tynan proposes an innovative project, 'Soft Robotics and Biomimicry - Improving HASEL actuators', designed to address the impracticalities holding soft robotics (robotics inspired by nature) back from worldwide adoption. With a background in HASEL actuators (a new subfield of soft robotics), Levi is well-positioned to spearhead this initiative.
[Objective]
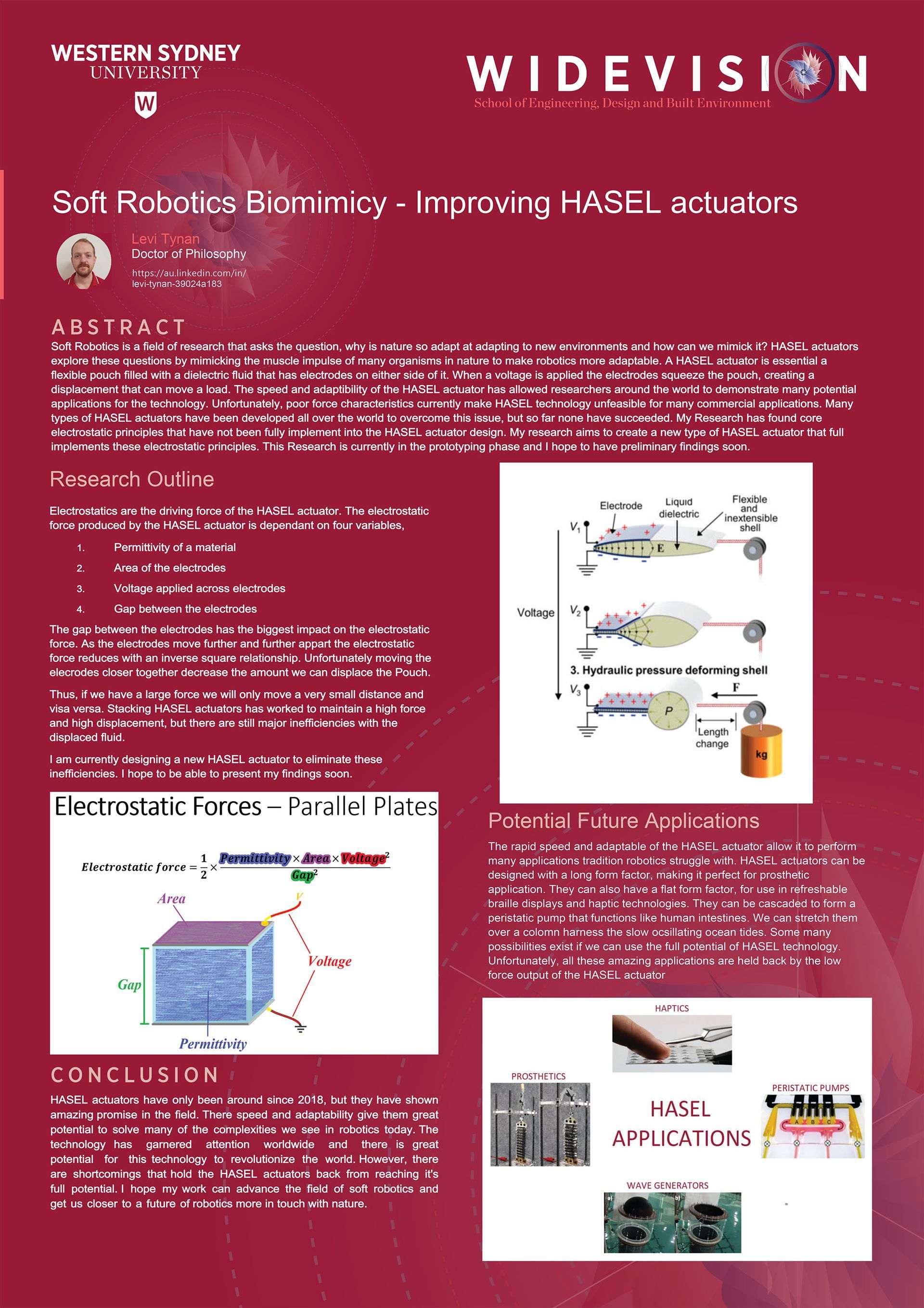
The primary objective of 'Improving HASEL actuators' is to design a new type of HASEL actuator that increases force production, severely lacking in current designs. The goal is to create a new direction for HASEL research and soft robotics by optimising electrostatic force principles not yet fully realised in existing HASEL designs.
[Significance]
Soft robotics is a field of research that is especially significant today as more and more robotics are being integrated into our domestic lives. Soft robotics use nature to inspire adaptive robotic designs that comply with nature, allowing them to be integrated into our lives in safer and simpler ways. HASEL actuators, in particular, have shown great potential in a wide range of applications, including prosthetics, medical pump devices, refreshable braille displays and even slow oscillating generators.
[Methodology]
Our research has identified that large gaps between electrodes in existing HASEL actuators reduce force production significantly. Many researchers have reduced their designs' electrode gap, but none have gone far enough due to reduced load displacement. Our design has overcome this issue, allowing HASEL actuators to produce high force and displacement. This project will leverage the latest in mechanical and electronic data acquisition equipment to ensure the robustness and reliability of the results.
[Expected Outcomes]
None of the benefits of soft robotics have been fully realised, as soft robotic technology has not come close to the force density of current motors and actuators today. The successful completion of 'Improving HASEL actuators' will mean creating a high force and high displacement actuator that matches/exceeds traditional robotics performance.
[Timeline and Milestones]
In mid-2023, we finished researching and reviewing the literature in the field of HASEL actuators. By early 2024, we hope to complete tests of our proof of concept and make a power supply to meet the specific needs of the HASEL actuator we will be building. Throughout 2024, we aim to have our new HASEL actuator developed and compared to the existing HASEL actuator performance. Through 2025 and 2026, we hope to optimise and implement our design into various applications, starting with prosthetics. The biggest potential challenge will be in the proof of concept phase, as our force predictions are idealised, and it is unclear what losses would hinder force performance.
[Budget]
The main costs of this project include acquiring components to build our new HASEL design and power supply and new equipment to fabricate the new HASEL actuator.
[Conclusion]
Soft robotics has the potential to replace every aspect of robotics as we know it, making it more adaptive and safe for humans to interact with. We are excited at the prospects for this research and expect to see significant results for the robotics community. We are also eager to work with academic and industry partners to develop new applications and design principles in robotics.